近日,我院智能装备与软件系统团队在机器人卡车装箱优化算法研究方面取得重要进展。该工作近期以“Solving a large-scale 3D packing problem with robot constraints(解决具有机器人约束的大规模三维装箱问题)”为题发表于《Computers & Operations Research》。东华大学机械工程学院为第一单位,青年研究员陈亮为本文第一作者,岳晓丽教授为本文通讯作者。

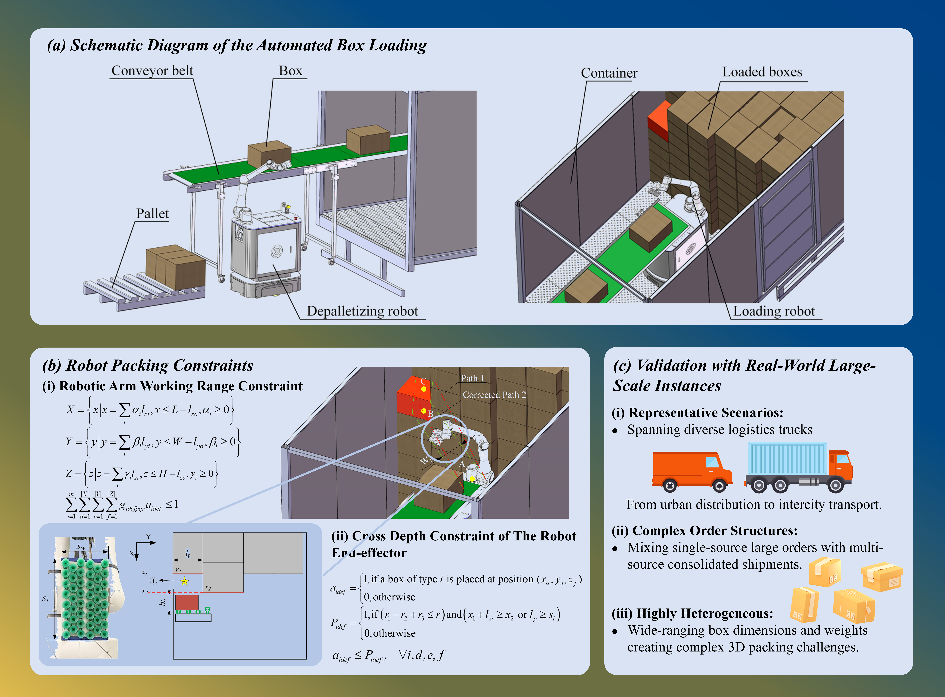
当前集装箱装载问题的研究多集中于人工与托盘装箱,针对机器人卡车装箱的研究相对匮乏。本研究提出了一种基于“列构建”的改进模拟退火算法(ISAA),该算法在满足箱体稳定性、承载能力、多订单等通用约束的同时,明确定义了机器人操作特有的约束,包括连续装载约束、机器人工作范围约束及末端执行器交叉深度约束。研究创新性地提出将货物组织为“统一列”与“混合列”的构建方法,并优化了模拟退火算法中的随机因子生成、分区冷却策略及终止条件,改进了“水平线”空间记录方法。实验结果表明,ISAA在60个测试案例中平均装载率高达91.03%,计算速度比现有方法快25.7倍(平均耗时仅1.94秒),且重心偏移稳定,显著提升了物流配送中心的装箱效率与机器人操作的可行性。
该研究工作得到了国家重点研发计划、上海市启明星项目扬帆专项、中央高校基本科研业务费等项目经费的支持。